Перейти к содержанию
Search for:
Главные новости для поклонников авиасимуляторов
simFlight Network
simFlight International
simFlight Russia
simFlight Germany
simMarket
Главная
Все новости
FAQ
MSFS
Prepar3D
X-Plane
Разные симуляторы
Обзоры
Hard&Soft
Скачать SIMMARKET App
Чат Telegram
X-Plane
FPS EMBRAER 190 X-PLANE 12
Не знаю насколько это хорошо, но рассказать обязан. В общем вышла модификация 190-го эмбраера для X-PLANE 12. Модель сделана группой разработчиков из Supercritical Simulations Group (SSG B748) и Ejet Evolution Series.
MSFS
День трафика.
Давненько не обновляли пакет ливрей для FSLTL трафика, и вот оно обновление под номером 1.2.3 😊
MSFS
А тут обновление ракабликов завезли
Выкатили 5-ю версию корабельного трафика Global AI Ship Traffic, включая обновленное расписание. Ранее у них была задумка сделать реальное расписание, но видимо пока рановато). .
MSFS
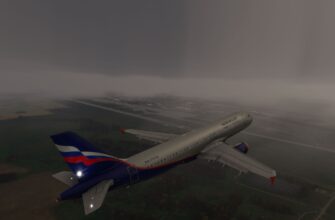
ACTIVE SKY FS – релиз
Наконец-то, дождались релиза погодника от мэтров погодникостроения 🤣. Как и ожидалось, никаких скидок владельцам предыдущий версий для разных симов нет, но и цена тут достаточно лояльная по сравнению с
MSFS
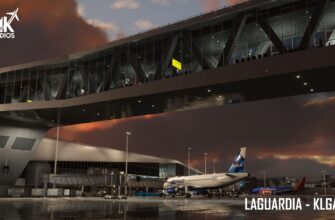
LAGUARDIA KLGA
Ла-Гуардия (англ. LaGuardia Airport) — аэропорт в северной части Куинса в Нью-Йорке, на берегу бухты Флашинг. Назван в честь бывшего мэра Нью-Йорка Фиорелло Ла Гуардия. В общем его завезли официально в релиз.
MSFS
FENIX A320 Base Package v 2.0.0.407
Немного по проекте А320. Итак, сегодня текущая (CFM / IAE) версия получила новую версию 2.0.0.407, и до среды ее можно утащить со скидкой 20% – £39.99. По мере выхода в нее будут добавлены без доплат
Все новости
MSFS
FMMI IVATO INTL. AIRPORT MADAGASCAR
40
26.04.2024
0
X-Plane
FPS EMBRAER 190 X-PLANE 12
45
26.04.2024
0
MSFS
CYHZ Halifax Stanfield International Airport V2
58
25.04.2024
0
MSFS
Accu-Sim Comanche 250 v1.5.0
131
25.04.2024
0
MSFS
День трафика.
378
23.04.2024
0
MSFS
А тут обновление ракабликов завезли
195
22.04.2024
0
MSFS
Microsoft выпустили локальную легенду №15: The Dornier Do 31
131
19.04.2024
0
MSFS
Aerosoft показали немношк Frankfurt Airport для MSFS
106
19.04.2024
0
MSFS
Aerosoft Mega Airport Oslo-Gardermoen
105
19.04.2024
0
MSFS
OV-10 BRONCO
66
19.04.2024
0
MSFS
LPPT LISBON AIRPORT
69
19.04.2024
0
MSFS
ACTIVE SKY FS – релиз
389
18.04.2024
0
MSFS
LAGUARDIA KLGA
94
17.04.2024
0
MSFS
Динозавров заказывали?
156
16.04.2024
0
MSFS
Aerosoft Mt. Everest Airports Vol. 1 – Lukla
156
15.04.2024
0
MSFS
FENIX A320 Base Package v 2.0.0.407
368
15.04.2024
0
MSFS
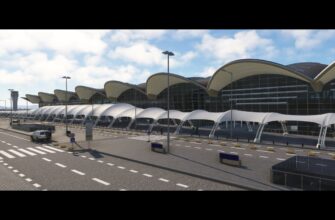
MK Studios анонсировали сценарий аэропорта LaGuardia
118
14.04.2024
0
MSFS
SSD – UNNT Новосибирск v1.6
319
14.04.2024
0
MSFS
Active Sky weather для Microsoft Flight Simulator
373
14.04.2024
0
MSFS
MMMD MERIDA INTERNATIONAL AIRPORT
99
13.04.2024
0
MSFS
SAZB BAHIA BLANCA AIRPORT
180
13.04.2024
0
MSFS
Aerosoft анонсирует Oslo Gardermoen
141
10.04.2024
0
MSFS
ASUNCIÓN INTL PARAGUAY SGAS
105
10.04.2024
0
MSFS
DAAG ALGIERS HOUARI BOUMEDIENE International Airport
116
10.04.2024
0
Этот сайт использует куки-файлы и другие технологии, чтобы помочь вам в навигации, а также предоставить лучший пользовательский опыт....
OK